| äō(chu©żng)Ø╔ÖCŲ„╚╦ |
| CHUANGZE ROBOT |
| äō(chu©żng)Ø╔ÖCŲ„╚╦ |
| CHUANGZE ROBOT |
ė╔ė┌ÖCŲ„╚╦╣żū„šŠĄ─ų„¾wįO(sh©©)éõĪ¬Ī¬ÖCŲ„╚╦╩Ūę╗ĘN╠ž╩ŌĄ─ÖCļŖę╗¾w╗»čbų├Ż¼┼cŲõ╦¹įO(sh©©)éõĄ─ ▀\ąą╠žąį▓╗═¼Ż¼ÖCŲ„╚╦į┌╣żū„Ģr╩ŪęįĖ▀╦┘▀\äėĄ─ą╬╩Į┬ė▀^▒╚ŲõÖCū∙┤¾║▄ČÓĄ─┐šķgŻ¼Ųõ╩ų▒█Ė„ ŚUĄ─▀\äėą╬╩Į║═åóäėļyęįŅA(y©┤)┴ŽŻ¼ėąĢrĢ■ļSū„śI(y©©)ŅÉą═║═Łh(hu©ón)Š│Śl╝■Č°Ė─ūāĪŻ═¼ĢrŻ¼į┌ŲõĻP(gu©Īn)╣Ø(ji©”)“ī(q©▒)äė Ų„═©ļŖĄ─ŪķørŽ┬Ż¼ŠSą▐╝░ŠÄ│╠╚╦åTėąĢrąĶę¬▀M╚ļŲõŽ▐Č©┐šķgŻ╗ėųė╔ė┌ÖCŲ„╚╦Ą─╣żū„┐šķgā╚(n©©i)│Ż ┼cŲõų▄▀ģįO(sh©©)éõ╣żū„ģ^(q©▒)ųž║ŽŻ¼Å─Č°śOęū«a(ch©Żn)╔·┼÷ū▓ĪóŖAöD╗“ė╔╩ųū”╦╔├ōČ°╩╣╣ż╝■’w│÷Ą╚╬ŻļUŻ¼╠ž äe╩Ūį┌╣żū„šŠā╚(n©©i)ÖCŲ„╚╦ČÓė┌ę╗┼_ģf(xi©”)═¼╣żū„Ą─ŪķørŽ┬«a(ch©Żn)╔·╬ŻļUĄ─┐╔─▄ąįĖ³Ė▀ĪŻę“┤╦į┌╣żū„šŠĄ─ įO(sh©©)ėŗ▀^│╠ųąŻ¼ąĶę¬│õĘųĘų╬÷┐╔─▄Ą─╬ŻļUŪķørŻ¼╣└ėŗ┐╔─▄Ą─╩┬╣╩’L(f©źng)ļUĪŻ
Ė∙ō■(j©┤)Ī░╣żśI(y©©)ÖCŲ„╚╦░▓╚½ęÄ(gu©®)ĘČĪ▒ś╦(bi©Īo)£╩Ż¼į┌ū„░▓╚½Ę└ūoįO(sh©©)ėŗĢrŻ¼æ¬(y©®ng)ū±čŁęįŽ┬įŁätŻ║ūįäė ▓┘ū„Ų┌ķg░▓╚½Ę└ūo┐šķgā╚(n©©i)¤o╚╦Ż╗«ö(d©Īng)░▓╚½Ę└ūo┐šķgā╚(n©©i)ėą╚╦▀Mąą╩ŠĮ╠Īó│╠ą““×ūCĄ╚╣żū„ĢrŻ¼æ¬(y©®ng)Ž¹ │²╬ŻļU╗“ų┴╔┘ĮĄĄ═╬ŻļUĪŻ
×ķ┴╦▒ŻūC╔Ž╩÷įŁätĄ─īŹ¼F(xi©żn)Ż¼į┌╣żū„šŠįO(sh©©)ėŗĢrŻ¼═©│Żæ¬(y©®ng)įōū÷ĄĮŻ║įO(sh©©)ėŗūŃē“┤¾Ą─░▓╚½Ę└ūo┐š ķgŻ¼╚ńłD7-2╦∙╩ŠŻ¼įō┐šķgĄ─ų▄ć·įO(sh©©)ų├┐╔┐┐Ą─░▓╚½ć·Ö┌Ż¼į┌ÖCŲ„╚╦╣żū„ĢrŻ¼╦∙ėą╚╦åT▓╗─▄▀M ╚ļŻ¼ć·Ö┌æ¬(y©®ng)įO(sh©©)ėą░▓╚½┬ō(li©ón)µiķTŻ¼«ö(d©Īng)įōķTķ_åóĢrŻ¼╣żū„šŠųąĄ─╦∙ėąįO(sh©©)éõ▓╗─▄åóäė╣żū„ĪŻ
╣żū„šŠąĶę¬įO(sh©©)ų├Ė„ĘNé„ĖąŲ„Ż¼░³└©╣ŌŲ┴ĪóļŖ┤┼ł÷Īóē║├¶čbų├Īó│¼┬Ģ║═╝t═Ōčbų├ęį╝░özŽ± čbų├Ą╚Ż¼«ö(d©Īng)╚╦åT¤o╣╩▀M╚ļĘ└ūoģ^(q©▒)ĢrŻ¼┴ó╝┤╩╣╣żū„šŠųąĄ─Ė„ĘN▀\äėįO(sh©©)éõ═Żų╣╣żū„ĪŻ
«ö(d©Īng)╚╦åTąĶę¬į┌įO(sh©©)éõ▀\äėŚl╝■Ž┬▀M╚ļĘ└ūoģ^(q©▒)╣żū„ĢrŻ¼ÖCŲ„╚╦╝░Ųõų▄▀ģįO(sh©©)éõąĶę¬į┌ĮĄ╦┘Śl╝■ Ž┬åóäė▀\▐D(zhu©Żn)Ż¼╣żū„š▀ĖĮĮ³Ą─ĄžĘĮæ¬(y©®ng)įO(sh©©)╝▒═Żķ_ĻP(gu©Īn)Ż¼ć·Ö┌═Ōæ¬(y©®ng)ėą▒O(ji©Īn)ūo╚╦åTŻ¼▓óļSĢr┐╔▓┘┐v╝▒═Ż ķ_ ĻP(gu©Īn) ĪŻ
ī”ė├ė┌ėą║”Įķ┘|(zh©¼)╗“ėą║”╣ŌŁh(hu©ón)Š│Ž┬Ą─╣żū„šŠŻ¼æ¬(y©®ng)įO(sh©©)ų├š┌╣Ō░ÕĪóšų╗“Ųõ╦¹īŻė├░▓╚½Ę└ūo čb ų├ ĪŻ
ÖCŲ„╚╦Ą─╦∙ėąų▄▀ģįO(sh©©)éõŻ¼ąĶę¬ĘųäeĘ¹║ŽĖ„ūįĄ─░▓╚½ęÄ(gu©®)ĘČĪŻ
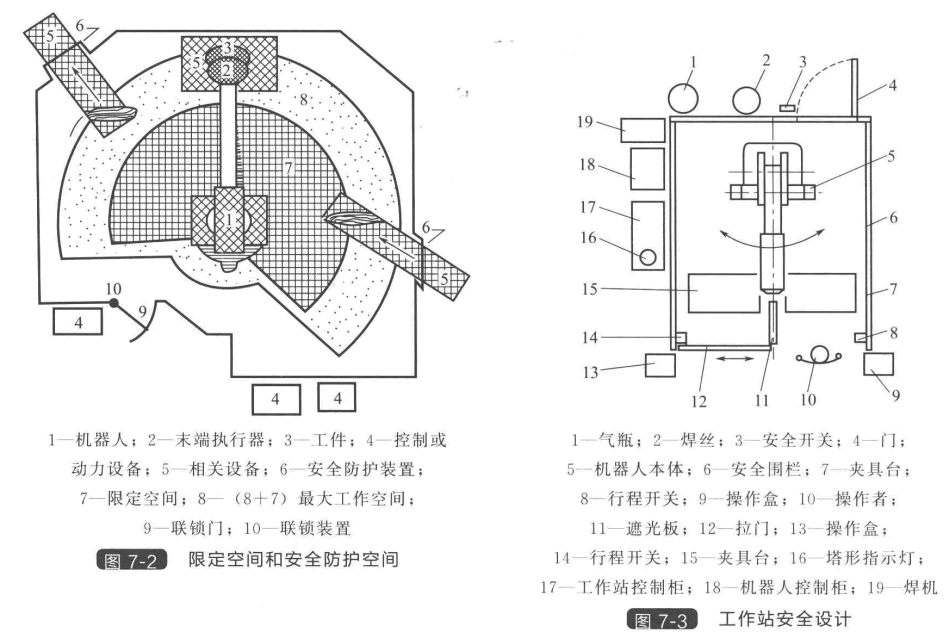
łD7-3╩Ūę╗éĆÖCŲ„╚╦║ĖĮė╣żū„šŠĻP(gu©Īn)ė┌░▓╚½┤ļ╩®įO(sh©©)ėŗĄ─īŹ└²ĪŻ
ó┘ė├õX║ŽĮą═▓─ū„ć·Ö┌║═ķTĄ─┐“╝▄ĪŻčb╔Ž░ļ═Ė├„╦▄┴Ž░ÕŻ¼ė├ęįš┌ō§╗Ī╣ŌŻ¼ā╔Į╗╠µčbŖA ║═║ĖĮėĄ─╣żū„┼_ę▓čbėąš┌╣Ō░ÕĪŻć·Ö┌ā╚(n©©i)ų╗ėąÖCŲ„╚╦║═╣żū„┼_ĪŻū„×ķ│÷┐┌Ą─└ŁķTŻ¼čbėą▓Õ░╬╩Į ļŖĮė³cķ_ĻP(gu©Īn)┼cÖCŲ„╚╦┬ō(li©ón)µiŻ¼ÖCŲ„╚╦ų╗─▄į┌ĻP(gu©Īn)╔ŽķTĄ─╣żū„┼_╔Ž▀Mąą║ĖĮėĪŻ
ó┌▓┘ū„š▀┼cŖAŠ▀┼_ų«ķgėąę╗╗Ņäė└ŁķTŻ¼┐╔└ŁŽ“A é╚(c©©)╗“B é╚(c©©)Ą─ŖAŠ▀┼_ĪŻ├┐é╚(c©©)Č╝ėąąą│╠ķ_ ĻP(gu©Īn)Öz£y└ŁķTĄ─╬╗ų├Ż¼Ūę┼cū„śI(y©©)åóäėėąī”æ¬(y©®ng)Ą─┬ō(li©ón)µi╗źµiĻP(gu©Īn)ŽĄĪŻ└²╚ń└ŁķTį┌A é╚(c©©)ĢrŻ¼╗źµiĻP(gu©Īn)ŽĄ ╩╣Ą├▓╗─▄åóäėB é╚(c©©)Ą─ū„śI(y©©)│╠ą“Ż¼▓┘ū„š▀┐╔į┌B é╚(c©©)░▓╚½ĄžčbąČ╣ż╝■Ż¼┬ō(li©ón)µiĻP(gu©Īn)ŽĄų╗į╩įSåóäė A é╚(c©©)ū„śI(y©©)│╠ą“Ż¼Ę┤ų«ęÓ╚╗ĪŻąą│╠ķ_ĻP(gu©Īn)Ą─▒O(ji©Īn)ęĢĘĮĘ©╩ŪĘųäeė├ųĖ╩Š¤¶’@╩ŠĀŅæB(t©żi)Ż╗Ūęā╔š▀▓╗─▄═¼Ģr Įė ═© ĪŻ
r ó█ė╔ė┌╩╣ė├ÜŌäėŖAŠ▀Ż¼▓┘ū„║ą╔Ž│²┴╦ėą╝▒═ŻĪóåóäė░┤Ōoų«═ŌŻ¼▀ĆėąČÓéĆŖAŠ▀▓┘ū„Ą─░┤ Ōoķ_ĻP(gu©Īn)ĪŻ×ķĘ└ų╣ū„śI(y©©)│╠ą“Ą─š`åóäėŻ¼åóäė▓┘ū„×ķļp░┤Ōoļp╩ųåóäėĪŻ╝┤ė├░▓čbŠÓļx╝s400mm Ą─ā╔éĆ░┤Ōo┤«┬ō(li©ón)╩╣ė├Ż¼═¼Ģr░┤Ž┬▓┼ėąą¦ĪŻČ°Ūęī”░┤ŌoĮė═©Ģrķg▀Mąą▒O(ji©Īn)ęĢŻ¼╚¶Įė═©Ģrķgį┌öĄ(sh©┤)├ļęį╔Žät═ŻÖCł¾Š»Ż¼ę“×ķ▀@┐╔─▄╩Ū░┤Ōoėą╣╩šŽ╗“┼õŠĆČ╠┬ĘŻ¼ęūę²░l(f©Ī)š`åóäėĪŻ
ó▄╣żśI(y©©)ÖCŲ„╚╦Ą─╩ŠĮ╠ęį═ŌĄ─▀\ąą▓┘ū„╩Ūį┌╣żū„šŠ┐žųŲ╣±Ą─▓┘ū„’@╩Š▒P╔Ž▀MąąĪŻŲõųąĄ─ ų„ļŖį┤ķ_ĻP(gu©Īn)║═╩ŠĮ╠Ī¬Ī¬▀\▐D(zhu©Żn)▀xō±ķ_ĻP(gu©Īn)ąĶę¬▓Õ╚ļĶĆ│ū▓┼─▄▐D(zhu©Żn)äėĪŻ×ķĘ└ų╣ę“ųĖ╩Š¤¶ōpē─Č°š`’@ ╩ŠŻ¼į┌╩ŠĮ╠─Ż╩ĮĢr┐╔Öz“×╦∙ėąĄ─ųĖ╩Š¤¶ĪŻĘĮĘ©╩Ūėąę╗éĆīŻė├░┤ŌoŻ¼░┤Ž┬ĢrųĖ╩Š¤¶╚½┴┴ät×ķš² │ŻĪŻ╣żū„šŠ┐žųŲ╣±Ą─D░Õų«╔Ž░▓čb3īė╦■ą╬ųĖ╩Š¤¶Ż¼Z╔Žīė×ķ╝t╔½Ż¼┴┴?x©¬)r▒Ē╩Š═ŻÖC(╣╩šŽ═Ż ÖCĢr░ķėąĘ┤╣ŌńRą²▐D(zhu©Żn)║═┬ĢĒæ);ųąīė×ķ³S╔½Ż¼▒Ē╩Š╩ųäė╗“╩ŠĮ╠Ż╗ZŽ┬īė×ķŠG╔½Ż¼▒Ē╩Š▀\ąąĪŻ
ó▌╩╣ė├Ħ┼÷ū▓é„ĖąŲ„Ą─║Ėśī░č│ųŲ„Ż╗įO(sh©©)Č©ū„śI(y©©)įŁ³cŻ╗įO(sh©©)Č©▄øśOŽ▐Ą╚ĪŻ
 |
| ÖCŲ„╚╦Ąū▒P Disinfection Robot Ž¹ČŠÖCŲ„╚╦ ųvĮŌÖCŲ„╚╦ ėŁ┘eÖCŲ„╚╦ ęŲäėÖCŲ„╚╦Ąū▒P ╔╠ė├ÖCŲ„╚╦ ųŪ─▄└¼╗°šŠ ųŪ─▄Ę■äš(w©┤)ÖCŲ„╚╦ ┤¾Ų┴ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖCŲ„╚╦ š╣ÅdÖCŲ„╚╦ Ę■äš(w©┤)ÖCŲ„╚╦Ąū▒P Š▀╔ĒųŪ─▄Į╠ė²ÖCŲ„╚╦ ųŪ─▄┼õ╦═ÖCŲ„╚╦ ī¦(d©Żo)ė[ÖCŲ„╚╦ |